GAN Metrics
Inception Score
- Concept 用图片分类器来评估生成图片的质量。清晰度:对于清楚的图片,分类器应该可以确定的判断该图的种类,那么其熵$p(y|x)$(即不确定性)比较小。多样性:对于所有生成的图片,每个种类应该均匀生成,所以$p(y)=\sum p(y|x^{(i)})$
Equation: $IS(G)=\exp(\mathbb{E}_{x\sim p_g}D_{KL}(p(y|x)||p(y)))$
- $\mathbb{E}_{x\sim p_g}$: 循环所有样本
- $D_{KL}$: KL散度
- $p(y|x)$: 对于图片x,属于所有类别的概率分布,对于给定图片x,表示为一个1000维向量
- $p(y)$: 边缘概率,具体实现为对于所有的验证图片x,计算得到$p(y|x)$,再求所有向量的平均值。
IS 有什么问题
- 数据集,因为基于InceptionV3,只能使用ImageNet1000,所以不能直接生成图片套用在InceptionV3上。
- 使用框架的不同,pytorch,tensorflow等,IS差别会很大
- IS高的图片不一定真实:因为是根据分类器来给分的,所以可以根据分类器的结果来刷分(提高全体图片的类别多样性,那么每一张图片的熵就会低)
- IS低的图片不一定虚假:如果图片的类不在1000类中则会低
- 多样性检测有局限性:如果每个类只生成一个样子,依旧是mode collapses
- IS不能反映过拟合:如果模型完全记忆数据集,给出Train集的数据,IS也会很高。
FID
- Definition: The Frechet distance $d(\cdot,\cdot)$ between the Gaussian with mean $(m, \Sigma)$ obtained from $p(\cdot)$ and the Gaussian with mean $(m_r, \Sigma_w)$ obtained from $p_w$. 假设原始图片和生成图片都服从高斯分布,计算两个分布的均值和协方差,算均值和协方差的距离。
- Equation: $d^2((m_g, \Sigma_g), (m_r, \Sigma_w) = ||m_g-m_r||^2_2 + Tr(\Sigma_g+\Sigma_w-2(\Sigma_g\Sigma_w)^{0.5})$
Method:
1. 加载图片[B,C,H,W], 文件数最好是bs的倍数否则会导致少读几个文件。 2. Inception V3去除输出层,只取到最后一个pooling层, 得到[Bx2048x1x1] feature(如果输入图片尺寸不对, 增加一个adaptive_avg_pool2d到1x1) 3. diff = m_g-m_r diff.dot(diff)+np.trace(sigma_g)+np.trace(sigma_r)-2*linalg.sqrtm(simga_g.dot(sigma_r))- FID 优缺点
- 优点1:生成模型的训练集可以和InceptionV3不同
- 优点2:刷分不会导致生成图片的质量变差
- 缺点1:强假设 提取的图片特征符合Gaussian
- 缺点2:无法反映过拟合的问题
LPIPS(Learned Perceptual Image Patch Similarity)
- $d(x,x_0)=\sum_l \frac{1}{H_l W_l} \sum_{h,w}||w_l \bigodot (\hat{y}^l_{hw}-\hat{y_{0}}^l_{hw})||$
- 通过预训练的VGG,AlexNet等网络,对一对图片x,x_0进行特征提取,对每层提取出来的特征计算归一化后相减得到diff并平方(?),将每层的diff过一个1x1的卷积(乘以w),并进行空间尺度上的平均,最后每层的输出相加。
- StarGANv2里使用LPIPS来测量多样性,数值越大说明越不相似。
- 对此存疑,原文中是通过训练一个simple network,将diff的结果输入到这个网络中让他判断是原图和distort图一对,来反过来finetune整个pretrained network。但是starganv2里好像直接采用了vgg的网络?
Precision and Recall(Improved)
- Motivation: 因为IS,FID等只有一个维度的分数,所以无法区分不同失败的例子。(无法同时满足真实性和多样性两个指标)
- Definition: 对于参考分布P(X)和学习到的分布Q(Y),
- Precision: 生成的图片可以落在真实分布的流型上的比例
- Density: 真实的图片覆盖生成分布的比例其中N,M是真实和生成的数量,流型Manifold定义为:其中$B(x,r)$是以x为球心,r为半径的D维球形;$\text{NND}_k(X_i)$是$X_i$到除了自己以外第k近的邻居的距离。
Density and Coverage
Motivation:precision和recall会受到outliers的影响且计算效率低。
- outlier: 在没有归一化操作前,一个outlier会使得得到的流型覆盖一大块在outlier附近的区域,从而让流型overestimate。
- precision: 生成的样本可能落在overestimate的流型部分中从而让percision看起来更高。
- recall:因为模型倾向于生成不真实但不同的样本,所以生成流型也经常比真正的生成分布大。另外由于每个模型的fake manifold都不同,每次都需要重新计算流型。
- computational inefficiency:需要两两计算距离,每个样本都需要计算$O(kM\log M)$
- outlier: 在没有归一化操作前,一个outlier会使得得到的流型覆盖一大块在outlier附近的区域,从而让流型overestimate。
于是提出了Density和Coverage
- Density:计算有多少个真实样本的neighborhood sphere包含$Y_j$,
- Coverage:计算所有真实样本中,neighborhood sphere包含至少一个生成样本的比例。
- mode collapse 和 mode dropping的区别?
- mode collapse是 many z to ~one x
- mode dropping是 real data not inG(z)
Perceptual Path Length
- Idea: 除了清晰度和多样性,生成器能否很好的把不同图片的特征分离出来也是一个关注的指标。StyleGAN的作者希望当我们给定一个z from latent space的时候,$z_1$能控制人的头发,$z_2$能控制人的眉毛等等,当调整$z_1$时,生成的图片只会有头发的变换。
- Equation: PPL评估利用生成器从一个图片变到另一个图片的距离,越小越好
- $\epsilon$ 细分的小段,1e-4
- $d(\cdot,\cdot)$ perceptual distance,用预训练的VGG来衡量
- slerp:spherical linear interpolation球面线性插值
- $t\sim U(0,1)$插值参数,服从均匀分布
Generative Adversarial Network、
WGAN
书接JS散度
考虑到几乎不可能去便利所有的联合分布$\gamma$去计算距离$||x-y||$的期望$\mathbb{E}_{(x,y)\sim\gamma}[||x-y||]$,因此直接计算$W(p_r, p_g)$是不现实的,WGAN提出用 Kantorovich-Rubinstein 对偶性将W转化为:
$\sup(\cdot)$是上确界,$||f||_L \leq K$表示函数$f: R\rightarrow R$满足K-阶Lipschitz连续性,即满足
于是,我们使用判别网络$D_\theta (x)$参数化$f(x)$函数,在$D_\theta$满足1阶Lipschitz约束的条件下,K=1,得到:
因此求解$W(p_r, p_g)$的问题转化为:
也就是在满足D(x)处处导数小于1的情况下求解最大值。所以在实际应用上作者的做法是,限制神经网络的所有参数$\theta$都不会超过某个范围[-c,c],这样关于输入样本x的导数$\frac{\partial f_\theta}{\partial x}$也就不会超过这个范围,所以通过这个上届,满足小于某个K值的上确界。
- 可以防止mode collapse,但不能提升图像质量。
WGAN-GP
添加了Gradient Penalty来迫使判别器满足1阶Lipschitz函数约束,同时发现在1周围工作效果更好
所以Discriminator的目标函数为:
第一项是EM距离,第二项是GP,其中$\hat{x}=tx_r+(1-t)x_f,\;\; t\in[0,1]$
Generator的目标函数为:
又第一项与G无关,可以省去得到
WGAN做了什么?
- 判别器去掉最后一层sigmoid
- discriminator和generator在算loss时没有log
- 每次更新判别器的参数后把他们的绝对值clip到一个孤单常数c
- 不使用Adam等基于动量的优化算法,推荐使用RMSProp,SGD也行
为什么WGAN要把vanilla GAN的最后一层sigmoid拿掉
- 因为原始的GAN的目标是判断图片的真假,所以用sigmoid来获取类别的概率。WGAN中判别器作为EM距离的度量网络,其目标是衡量生成分布$p_g$和真实分布$p_r$之间的EM距离,属于实数空间,所以不需要加Sigmoid。
Vanilla GAN
- Idea: 给定一个latent z使用generator来生成图片,使用discriminator来判断区分生成图片和真实图片,并返还gradient给Generator更新参数。Discriminator的目标是最大化区分真假的结果,Generator的目标是最小化其生成图片被判断为假的概率。最后两者大道纳什均衡。
Equation:
Discriminator:
Generator:
- 因为$\log(1-D(G(x)))$的梯度很小,作者用了一个log D trick,将其替换为最大化$\log(D(G(x))$,其梯度更大,且和Discirminator学习的方向一致。
所以总的目标函数为:
Vanilla GAN的问题
判别器越好,生成器梯度消失越严重。
- 当固定G的时候D Loss变为:$-P_r(x)\log(D(x))-P_g(x)\log(1-D(x))$
令其关于D(x)的导数为0的道论文里于是证明:当$P_r(x)=0$且$P_g(x)\neq0$时,最优判别器应该为给出0(也就是说判断生成的图片都为假);而当$P_r(x)=P_g(x)$时,最优判别器应该给出0.5(也就是说无法判断谁真谁假)
于是我们回头看Generator的loss,加上一项判断$x_r$的值对于gradient并无影响(最小化他等同于最小化之前的loss),得到:
把公式【2】带回,得到
根据JS散度:
在假设中JS散度对于有重叠的两个分布则公式是成立,但是因为GAN的z的取值有限(比如2^6维)而要生成的图片维度极高(比如256*256=2^16),则图片虽然在高维,但是其变化受到z值的限制,于是两个$p_r$和$p_g$的分布就很难会有重叠;如果没有重叠,那么JS散度就变成了0,而损失也就变成了-2log2,而梯度就变成了0。
- 当固定G的时候D Loss变为:$-P_r(x)\log(D(x))-P_g(x)\log(1-D(x))$
- 最小化第二种生成器loss函数,会等价于最小化一个不合理的距离衡量,导致两个问题,一是梯度不稳定,二是mode collapse。
经过推导,最小化第二个G loss函数等同于最小化一边是要最小化生成分布和真实分布的KL散度,另一边却又要最大化两者JS散度,于是会梯度不稳。另外,$KL(P_g||P_r)$项对生成的样本不真实时惩罚巨大,对没生成真实样本的情况惩罚微小,导致生成器偏向生成几种确定的样本,从而导致模式坍塌。
LSGAN
惩罚离群的点,让生成图像接近真实数据
但是会使得生成图像失去多样性
DCGAN
- 把GAN的mlp转变为全卷积。Generator里用Conv2dTranspose进行上采样,一步一步扩大图片尺寸。
- Generator中使用ReLU作为激活函数
- Discriminator和Generator对称,取消pooling层,用带步长的卷积代替,一步一步缩小图片,最后判断图片真假。
- Discriminator中使用Leaky ReLU。
- Generator和Discriminator中使用BN层(稳定GAN的训练)
- 实验表示但不要对generator的输出层和discriminator的输入层使用BN,会不稳定
- 提出latent interpolation,对于z1,z2生成的两张图片x1,x2, 如果对z1,z2进行线性插值生成的图片应该显示从x1逐渐渐变到x2。如果图像发生急剧变化,则就是模型没有学到特征只是记住了图像。
- 通过生成模型输入向量的加减发修改图像,类似word2vec,king-man+woman=queen
Improved Techiques for Training GANs
- Feature matching: 因为generator和discriminator在进行min max的纳什均衡游戏,但是两者的目标函数又是凹函数,会导致两者loss此消彼长。提出使用discriminator作为feature extractor,然后将generator的目标改为$||\mathbb{E}_{x\sim p_r}f(x)-\mathbb{E}_{z\sim p_z}f(G(z))||_2^2$。
- 个人认为虽然在统计意义上是合理的,但是不是很make sense,在多轮epoch中一张图片会有不同z生成,势必导致G混淆latent的作用。
- Minibatch Discriminator:认为mode collapse的原因和discriminator每次只看一张图片有关,由于每次只看一张图片,discriminator容易落入local minimal无法跳出。所以使用minibatch,对于discriminator中间的一层输出,每个图的特征$x_i\in minibatch$通过一个矩阵T,映射成一个矩阵。然后每个图对应的矩阵的第k行两两做L1距离的计算并求和,然后重新组成一个n x B的矩阵作为下一层的输入。
- 后来的文章基本没有用这个方法。
- Historical averaging 生成和判别器的损失函数中添加一项正则项,$||\theta-\frac{1}{t}\sum_{i=1}^{t}\theta[i]||^2$,通过保证和之前的参数的抖动不过大来控制GAN的稳定性(后来的文章几乎也没见过,有使用衰减系数来记录参数的)
- One-side Label Smoothing
- Virtual Batch Normalization
- 提出了IS ,感觉是本文唯一被引用的原因。
Conditional GAN
在Vanilla GAN的基础上添加了条件概率,使得目标函数变为
具体操作中就是
- 把输入的z和类别c做concat,作为输入给generator
- 把$x$和c作为输入给到判别器,让他判断(1)x是否是真实的,(2)x是否属于类别c
Pix2Pix
- Generator:使用Unet结构,输入的轮廓图x进行encode,然后再decode成图片
- Unet:输入和输出的图像的surface appearance应该不同,而潜在的结构(underlying structure)应该相似。对于I2IT的任务来说,输入和输出应该共享一些底层信息,因此使用Unet这种跳跃连接(skip connection)的方法,i层与n-i层concat。
- Discriminator:使用条件判断器PatchGAN,将图片变成70x70的区块并判断每个区块的真假并统计。
- 因为L1和L2 loss重建的图像很模糊,并不能很好的恢复图像的高频部分(图像的边缘等),而对于低频部分(色块等)恢复良好,所以采用patch的方式分区块对局部进行判断。
- Loss Function
- 作者认为L1 loss可以来补充低频信息,而GAN Loss可以来补充高频信息
- 缺点:x到y之间是一对一的映射,应用范围有限,且test的数据与train数据差距较大时效果很差。
BicycleGAN
为了增加多样性
VAE-GAN
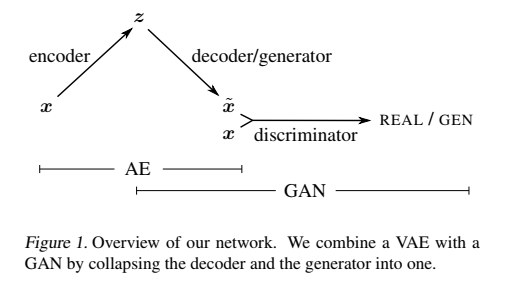
图片压缩成z,再还原成图片最后GAN loss判断cVAE-GAN
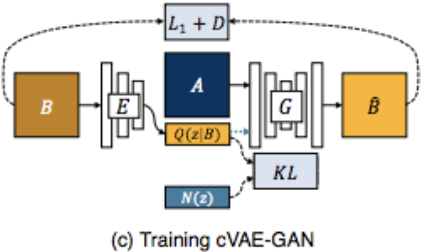
不变的是:
- L1 和 D的loss
- 从 B到 z 再到B
在VAEGAN的基础上添加了
- 压缩的z和随机采样的z做kl损失,使得压缩的z符合随机分布
- Generator take A and z as input
- cGAN
- 将class和latent concat作为输入给generator
- cLR-GAN
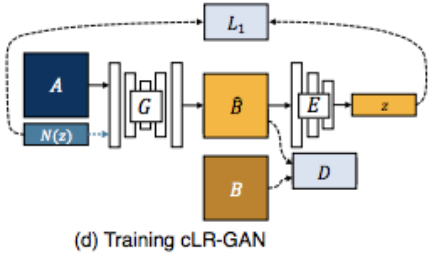
- 不变的是:
- A对应的就是y, z还是随机的变化,作为G的输入
- 真实B和生成的B做D的判断
- 在cGAN的基础上添加了
- Encoder,并重新压缩B得到$\hat{z}$和z做L1 loss
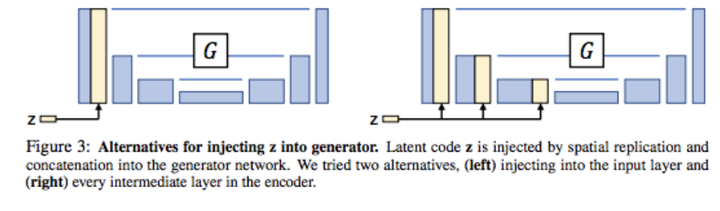
- 不变的是:
- Unet中z有两种concat的方法:
CycleGAN
不再需要paired data,通过cycle consistency loss,即$A\underset{G_A}{\rightarrow} B \underset{G_B}{\rightarrow} \hat{A}$后求$||A-\hat{A}||_1$
- discriminator中使用了LSGAN的最小二乘损失MSE