Overview
我们可以大致把模型分为两类
- Discriminative Model 判别模型
- Generative Model 生成模型
判别模型中,比如分类模型,就是求解最大化后验概率,即直接对后验 $p(C_k|x)$ 建模,显性或隐性地求出其表达式
而生成模型中,则需要直接或间接对p(x)建模:
AutoEncoder
比方说我们有一堆图像数据x,通常FC,CNN的等做法是通过我们设计的神经网络中的隐藏变量,判断标签,然后反向传播误差学习并不断调整这些隐藏变量。$x \rightarrow z \rightarrow classifier$ 而这些隐藏变量就是一些我们理解或无法理解的特征。这一步相当于是一个encoder,把数据编码成特征。
换一种思路,我们可以直接利用这些隐藏变量直接来,$x \rightarrow z \rightarrow \hat{x}$ ,然后我们再比较学习L2 loss_function $\mid\mid(\hat{x}-x)\mid\mid^2$。这个过程中,我们相当于通过学习到的一些隐藏特征重建图片,然后再和原图对比。这一步相当于是一个decoder,把特征解码还原成数据。
通过一段时间的学习后,我们可以把 $z\rightarrow \hat{x}$ 的连接(decoder)去掉,重新换成普通的classifier,与输入的标签配合起来,$x \rightarrow z \rightarrow classifier$。这样只需要少量的数据我们就可以完成一个判断模型了。
Variational AutoEncoder
目标
我们希望有一个模型能生成我们想要的数据。
这是一个概率版本的AutoEncoder,通过对模型抽样来生成数据。举例来说,这就是像是我们讲高斯分布时的那个小球实验,模型就是那个充满柱子的板,而每一个小球就是一次抽样,通过足够多的抽样,我们就可以生成一个类似的高斯分布。
接着我们可以假设,万物皆有规律,存在着一些隐藏变量z,控制着如何生成我们的数据。当然还有一些全局变量 $\theta$ 也影响着我们的x和z。
那么,根据上面的描述,相互作用的关系如下图所示
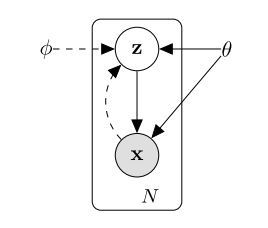
所以从先验 $\theta$ 中采样 $p_{\theta^{ }}(z)$,采样x的概率为 $p_{\theta^{ }}(x \mid z^{(i)})$。
因为我们不知道z究竟是啥,那么就请出万能的高斯分布使得z服从高斯分布。
但是建立在隐藏变量z上的x的概率p(x|z)就比较复杂了,我们可以使用神经网络来表示它,也就是说,在 $z \rightarrow x$ 中加一个Decoder Network变成, $z \rightarrow Decoder\;Network \rightarrow x$
根据全概率公式,数据x的概率可以表示为
在上式中,$p_{\theta}(z)$ 我们已经假设成一个简单的高斯先验了,$p_{\theta}(x|z)$ 我们假设成了一个希望学习的神经网络,但是问题就出在积分上,我们很难对每个z值都去计算p(x|z),所以直接对p(x)建模这条路走不通了。
那么再看一下后验分布
其中 $p_{\theta}(x|z)$ 和 $p_{\theta}(z)$ 如上,但是问题出在分母 $p_{\theta}(x)$ 上,原因同上。显然这条路也走不通。
仔细一看,$p_{\theta}(x|z)$ 和 $p_{\theta}(z|x)$ 不就是我们autoencoder中的解码器decoder和编码器encoder么?
那么既然 $p_{\theta}(z|x)$ 我们求不出,不如换个思路找一个接近它的 $q_{\phi}(z|x)$,这一步就是变分推断Variational Inference。
Variational Inference 变分推断
直观理解
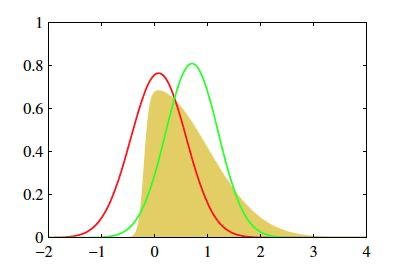
对于上图图的黄色分布p(我们观测到的数据),我们希望能找到一个相近的分布q,尽量使得猜测的分布和黄色分布重合。
具体步骤
- 我们拥有两部分输入:数据 $X$ 和模型 $p(z,x)$
- 目标是求后验概率 $p(z|x)$ ,但是不能直接求。
我们构造一个后验概率 $p(z|x)$ 的近似分布 $q(z;v)$
- 如何构造q(z;v)?
- 我们知道p的分布是高斯分布,那么可以假设q同样是高斯分布(其实用exponential family的分布也行)
- 误差用KL散度计算,用ELBO不断缩小逼近q和p之间的距离直至收敛。
回到VAE的问题来
既然假设了p和q两个是解码器和编码器,我们可以做如下建模:
其中 $\Sigma$ 是标准差组成的对角矩阵。而在里面,我们用 $q(z|x)$ 来接近 $p(z|x)$,所以q分布属于exponential family,$q_{\theta}(z∣x)$。 假设p是高斯分布,则q也可以假设为高斯分布。
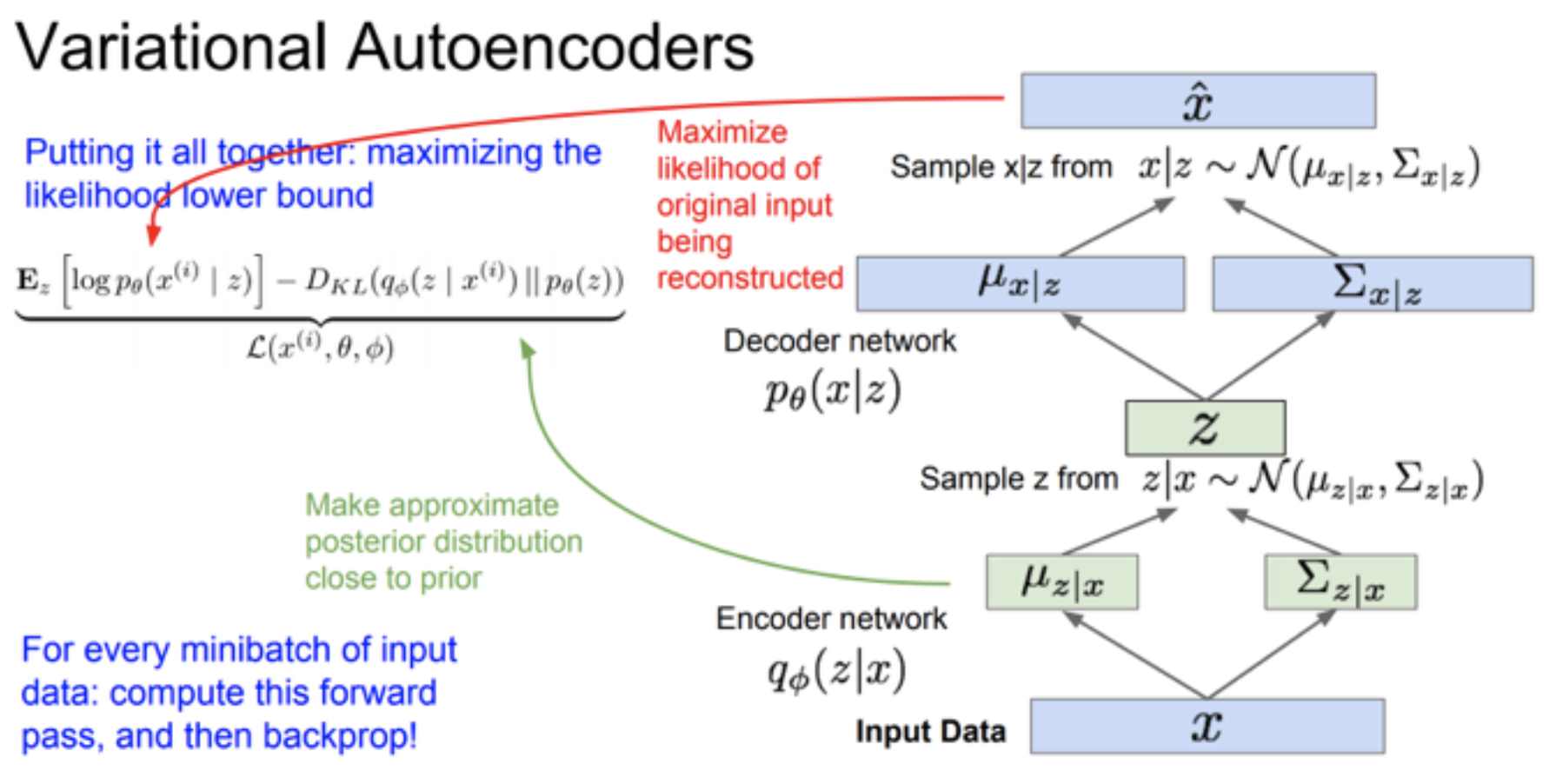
所以我们的log data likelihood:
好了,我们来看一下每一项
- $E_z[log\:p_{\theta}(x^{(i)}|z)]$ 可以通过解码器 $p_{\theta}(x|z)$ 计算估值。
- $\mathbb{KL}(q_{\phi}(z|x^{(i)})||p_{\theta}(z))$ 这个KL散度求的是encoder的高斯分布和先验z的熵差,不难求。
- $\mathbb{KL}(q_{\phi}(z|x^{(i)})||p_{\theta}(z|x^{(i)}))$ 这个散度无法求,但是我们知道KL散度一定大于等于零
前两项就组成了可以计算的下界
也就是ELBO
我们的目标是最大化ELBO下界。
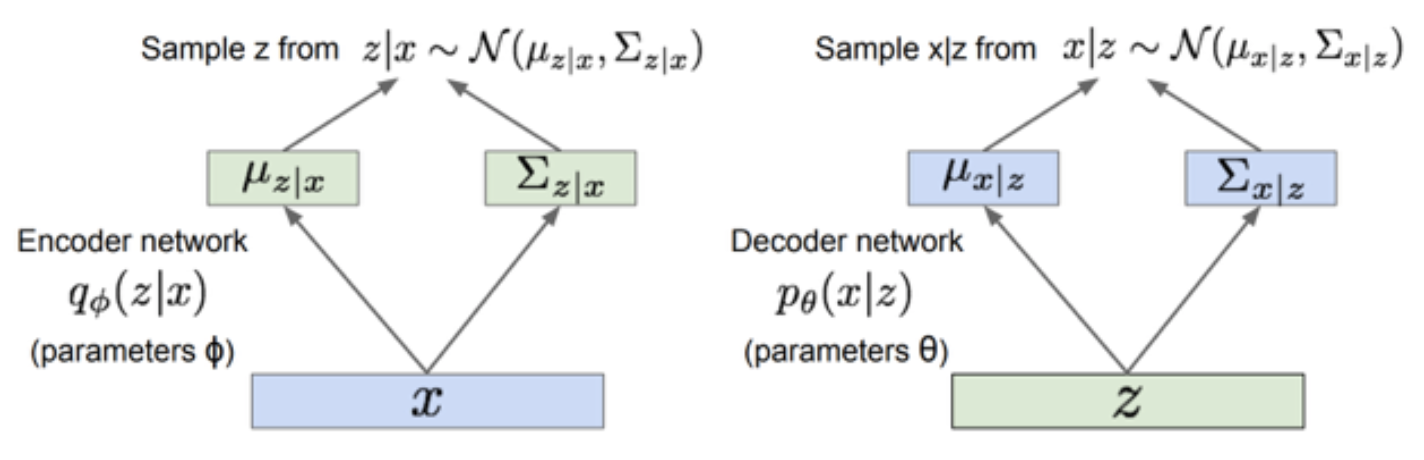
回到神经网络来
我们从下往上捋。
- 输入是x
- 通过encoder network,我们得到对应的 $\mu$ 和 $\Sigma$
- 因为我们假设 $q_{\phi}(z|x)$ 服从高斯分布,所以我们就可以得到$q_{\phi}(z|x) = \mathcal{N}(z|\mu(x;\theta),\sigma(x;\theta))$
- 已知z也是服从高斯分布的,那么可以根据KL散度计算第二项了
- $z=q_{\phi}(z|x)$
- 把得到的z通过decoder network,得到 $\hat{x}$,也就是我们构造出来的数据
- 那么第一项也可以计算了
这样我们就算出了一组数据下界,然后可以反向传播。
1 | VAE: |
1 | VAE encoder: 返回 fc21(Relu(fc1(x)) , fc22(Relu(fc1(x)) |
1 | VAE decode: Sigmod(fc4(Relu(fc3(z)))) |
1 | VAE forward: |
1 | 每个epoch: |
Reparameterize Trick
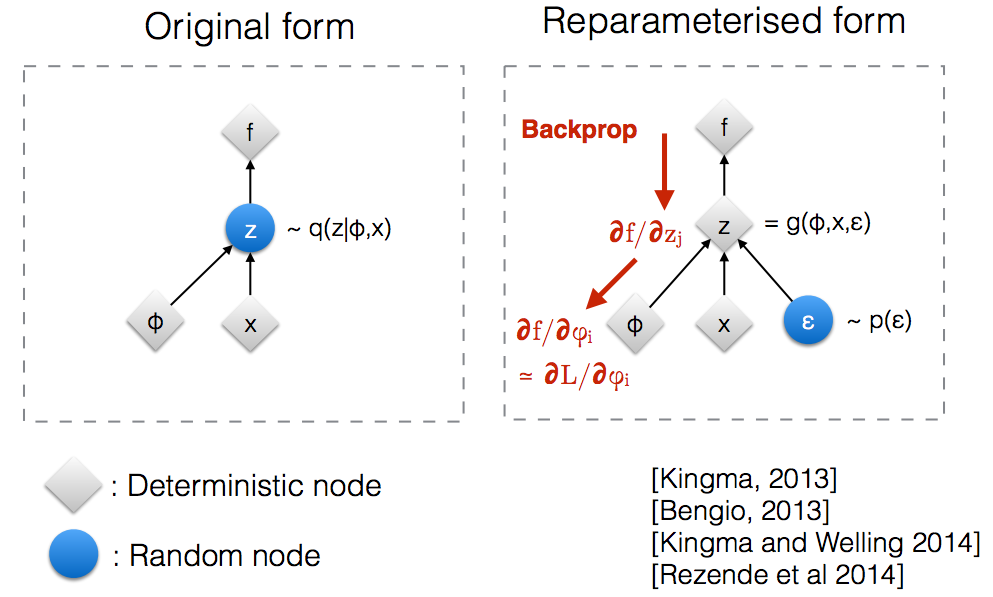
如果直接用z作为隐藏函数,那么在反向传播时会被阻断。把z分解为 $\mu$ 和 $\sigma$,方便梯度传播
1 | VAE reparameterize:eps ~ N(0 , e ^ (0.5 * logvar)), 返回 mu + eps*std |
GAN Generative Adversarial Network
在VAE中我们看到了如何用decoder从隐藏变量生成 $\hat{x}$,那么我们换一个思路,能不能直接让一堆噪声z,生成 $\hat{x}$。再去通过比较拥有的数据图片,进行学习。
于是我们就有了生成对抗网络。顾名思义,这个网络有两部分组成,Generator和Discriminator。
生成器就和VAE中的decoder一样。而Discriminator就和CNN网络一样。想法是,我们生成的图片一定是假的,而喂的图片是真的,通过Discriminator来判断那些图是真的,那些图是假的,并通过判断的结果反向传播给Generator让他不断进步,直到Discriminator无法再分辨我们的生成的图片是真是假(为什么是0.5?如果直接全部判断为真,那说明这个判别器被overtrain了,无法保证我们生成器的效果)
这就像一个造假币的人和一家造验钞机的厂家,造假币的人造出假币给验钞厂的人,如果失败了他就知道该怎么改进,验钞机也在不断进步,直到最后如果验钞机不能判断那个人造的假币,那么就成功了。
Min Max Game
详细的证明写得很清楚这里就不再赘述了。
Algorithm
1 | 对于每个iteration: |
优势和缺陷
优势:
- 生成了更好的样本
- 理论上来说,可以训练任何一种生成器网络
- 无需设计任何种类的因式分解模型,随便拿来一个生成器和鉴别器都可以用
- 无需设计MC反复采样,无需Inference,回避了近似计算棘手的概率难题
- 和VAE相比,它没有变化的下限。如果鉴别器网络能完美适合,那么这个生成器网络会完美的回复训练分布。也就是说各种对抗式生成网络会渐进一致(asymptotically consistent),而VAE有一定的偏置
缺陷:
- 无法收敛non-convergence
- Collapse Problem:因为没有损失函数,我们的训练只能靠肉眼来判断,很难判断是否在取得进展。在发生崩溃问题时,Generator开始退化,生成相同的样本点,而Discriminator也会对相似的样本点指向相似的方向,导致训练无法继续
- 无需预先建模,模型过于自由不可空。图片变大,维度变多就开始不可控了。所以才会让Discriminator生成k次,Generator才生成1次